Режим ручного управления
В режиме ручного управления робот управляется человеком-оператором при помощи пульта дистанционного управления (пульта ДУ). При этом оператор обладает полным контролем над роботом: никакие команды, посылаемые программными компонентами или иными источниками управления, за исключением пульта ДУ, выполняться не будут.
Пульт дистанционного управления
Пульт ДУ поставляется в комплекте с базовой платформой робота Вомбат. Он позволяет оператору вручную управлять роботом, а также переключаться из режима ручного управления в автономный режим и обратно. Далее рассмотрено назначение основных кнопок пульта RadioLink RC6GS; его детальное описание можно скачать на сайте производителя.

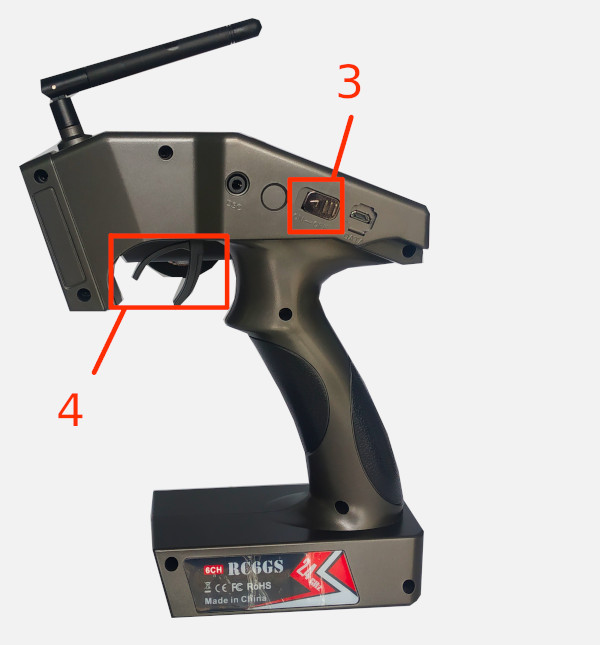
Нажатие “на себя” рычага управления линейным движением (4) соответствует движению робота вперёд; нажатие “от себя” — движению задним ходом. Скорость движения робота регулируется силой нажатия на рычаг.
Вращение колеса (2) в направлении “от себя” соответствует повороту направо, в направлении “на себя” — повороту налево.
Внимание! Во избежание возникновения опасных ситуаций пульт ДУ должен переключаться в режим автономного управления непосредственно перед началом автономного движения робота. По завершении сеанса автономного движения пульт должен быть незамедлительно возвращен в режим ручного управления. В случае, если автономно движущийся робот начинает совершать потенциально опасный манёвр, рекомендуется незамедлительно остановить его, переведя пульт ДУ в режим ручного управления.
При отладке алгоритмов управления роботом рекомендуется сначала запустить все управляющее ПО и убедиться в корректности построенной роботом траектории движения, после чего перевести пульт в автономный режим. В случае, если возникла необходимость перезапуска той или иной части управляющего ПО, также рекомендуется совершать все соответсвующие действия в режиме ручного управления.
Внимание! Для обеспечения безопасной работы с роботом необходимо сначала включить пульт ДУ и убедиться, что он переведен в режим ручного управления, после чего можно подавать электропитание на контроллеры двигателей. При выключении робота необходимо сначала обесточить контроллеры двигателей, а затем выключить пульт.
Работа с роботом в режиме ручного управления
Внимание! Перед началом движения необходимо ознакомиться с разделом Безопасность.
Порядок включения робота Вомбат для работы в режиме ручного управления:
-
Убедитесь, что к роботу не подключены внешние устройства (мониторы, клавиатуры и т.п.), зарядное устройство отсоединено и нет проводов, соединяющих робота со стационарными объектами.
-
Убедитесь, что вокруг робота достаточно места для выполнения манёвров.
-
Включите пульт ДУ с помощью кнопки (3).
-
Переведите робота в режим ручного управления, переключив тумблер (1) в положение “от себя”.
-
Включите общее питание робота и питание контроллеров двигателей в соответствии с документацией.
Чтобы убедиться, что робот корректно работает в режиме ручного управления, выполните слеующие действия:
-
Аккуратно нажмите на рычаг управления линейным движением (4) — робот должен начать медленно двигаться вперёд или назад в соответствии с направлением нажатия.
-
Попробуйте осуществить разворот на месте. Для этого необходимо плавно поворачивать колесо управления вращением (2) до тех пор, пока робот не наберёт желаемую угловую скорость.
Для того, чтобы робот повернул в движении, поверните колесо (2) в нужном направлении, удерживая при этом рычаг (4).
По завершении работы с роботом, отключите питание контроллеров двигателей и общее питание, выключите пульт ДУ.