Вомбат: базовая платформа
Базовая платформа обеспечивает передвижение Вомбата и его электропитание. Внутри нее располагаются моторы и их контроллеры, а также тяговые свинцово-кислотные аккумуляторы, обеспечивающие электропитание ходовой части и подсоединенного отсека для оборудования.
| Технические характеристики | |
|---|---|
| Габаритные размеры (Д х Ш х В) | 900 х 680 х 470 мм |
| Масса | 70 кг |
| Максимальный вес нагрузки | 70 кг для ровной местности 50 кг для любой местности |
| Максимальная скорость | 1 м/с |
| Номинальное время работы | 3 ч без нагрузки |
| Время полного заряда | 5 ч |
| Диаметр колес | 410 мм |
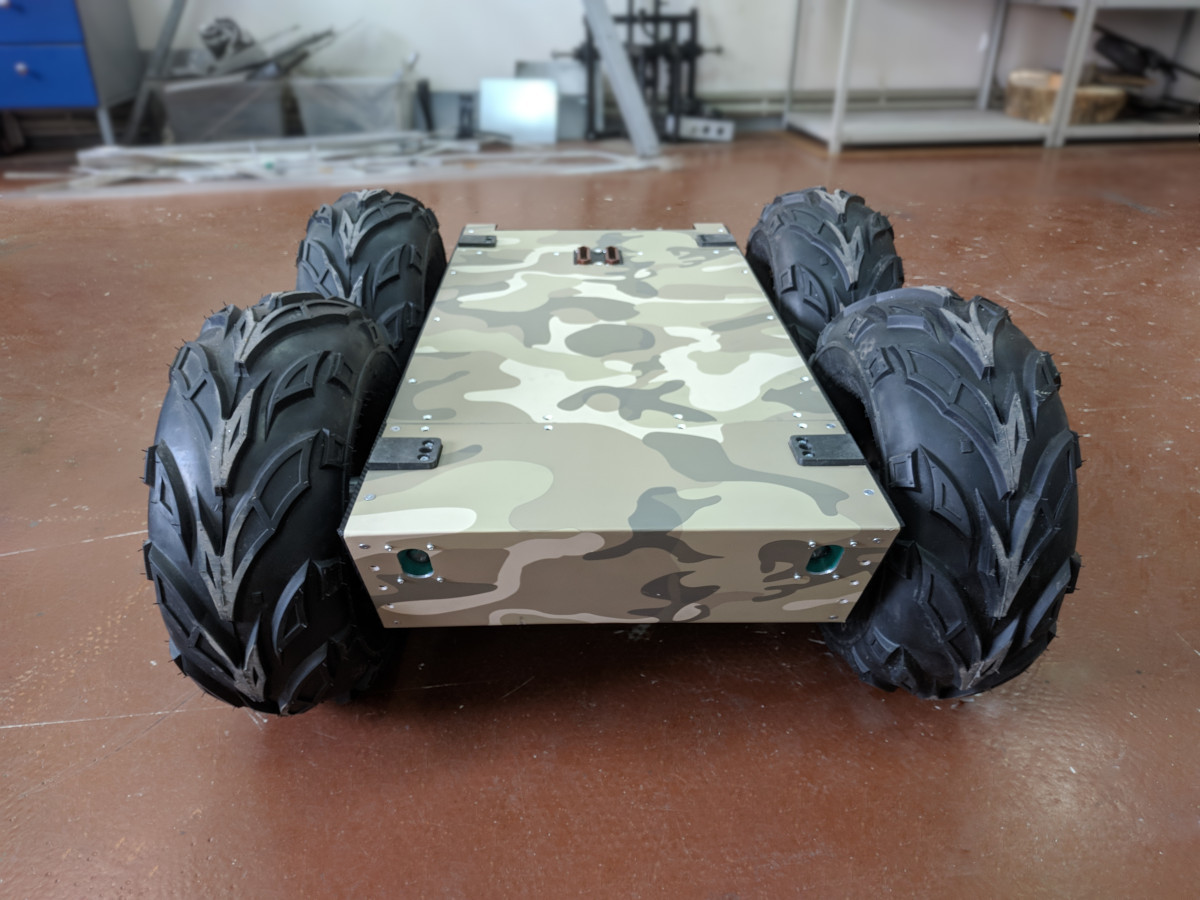
В основе платформы лежит сварная рама, обеспечивающая грузоподъемность до 50 кг. Спереди и сзади Вомбат оснащен бамперами, защищающими элементы конструкции и установленное оборудование от механических повреждений в случае возможных столкновений с теми или иными препятствиями. Простой механизм смены колёс позволяет подстраиваться под сезонность и местность эксплуатации.
В роботе установлены двигатели с планетарными редукторами, способные поддерживать высокий момент даже при низкой угловой скорости, а раздельное управление правой и левой сторонами платформы позволяет Вомбату поворачиваться на месте. Для управления движением используются силовые контроллеры двигателей и энкодеры, показания которых позволяют оценивать скорости движения колёсных осей.
Основное напряжение питания - 24 В; в отсек для оборудования подаются также напряжения 5 В, 12 В, 20 В, 48 В. Каждая линия электропитания снабжена предохранителем и выключателем, что позволяет осуществлять раздельное включение и выключение компонентов робота. Зарядка аккумуляторов производится от стандартной сети 220 В при помощи зарядного устройства, поставляющегося вместе с роботом.
Для коммуникации с отсеком для оборудования используются встроенные в верхнюю часть платформы разъемы, а для надежного крепления модулей друг к другу - боковые петли.
Элементы корпуса


В передней части корпуса расположены фары для дополнительного освещения в условиях плохой видимости. В задней части корпуса расположены кнопка общего включения робота, индивидуальные автоматические выключатели, вольтамперметр и разъем для подзарядки робота.
Автоматические выключатели (предохранители) подключены к следующими линиями электропитания:
- общее питание 24 В — подключение к аккумуляторам;
- питание контроллеров управления моторами;
- линии 12 В, 20 В, подаваемые в отсек для оборудования;
- линия 48 В, подаваемая в отсек для оборудования.
Вольтамперметр предназначен для отображения текущих значений напряжения и тока на аккумуляторах. При помощи него можно своевременно определить, что Вомбат полностью зарядился либо же, наоборот, нуждается в подзарядке.
Разъем для подзарядки снабжен защитным колпачком, защищающим его от внешней среды, и направляющими, обеспечивающими защиту от некорректного подключения зарядного устройства.
Контроллеры двигателей
Для индивидуального управления двигателями используются силовые контроллеры, рассчитанные на подключение двигателей суммарной мощностью до 720 Вт. Между собой контроллеры соединены при помощи интерфейса RS-485, а к бортовому компьютеру подключаются посредством сети Ethernet. Способ объединения контроллеров в единую систему таков, что взаимодействует пользователь только с одним из контроллеров, передавая ему управляющие команды и получая от него такие данные как температура двигателей, напряжение в бортовой сети и т.д.
Для взаимодействия с контроллерами при помощи программной среды ROS существует драйвер wombat_hardware_driver.