Построение 2D карты помещения
- Общие сведения
- Набор датчиков для построения карты
- Обзор доступных пакетов для построения карты в ROS
- Построение карты помещения с помощью hector_slam
- Сохранение карты
Общие сведения
Автономная навигация на заранее известной карте - один из возможных сценариев применения роботов, который представляет большой интерес со стороны исследователей в области робототехники. Для функционирования робота в данном режиме необходимо заранее построить карту той местности, где предполагается навигация.
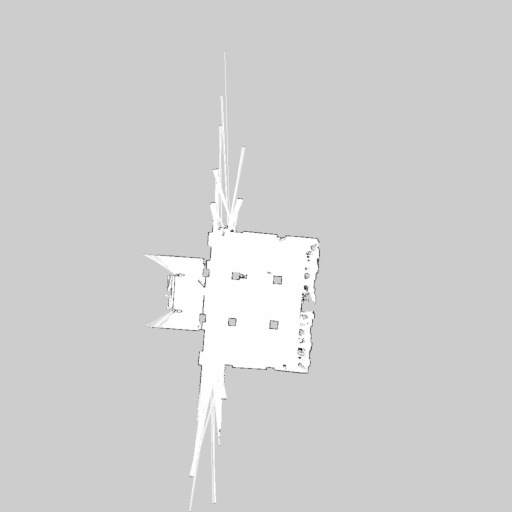
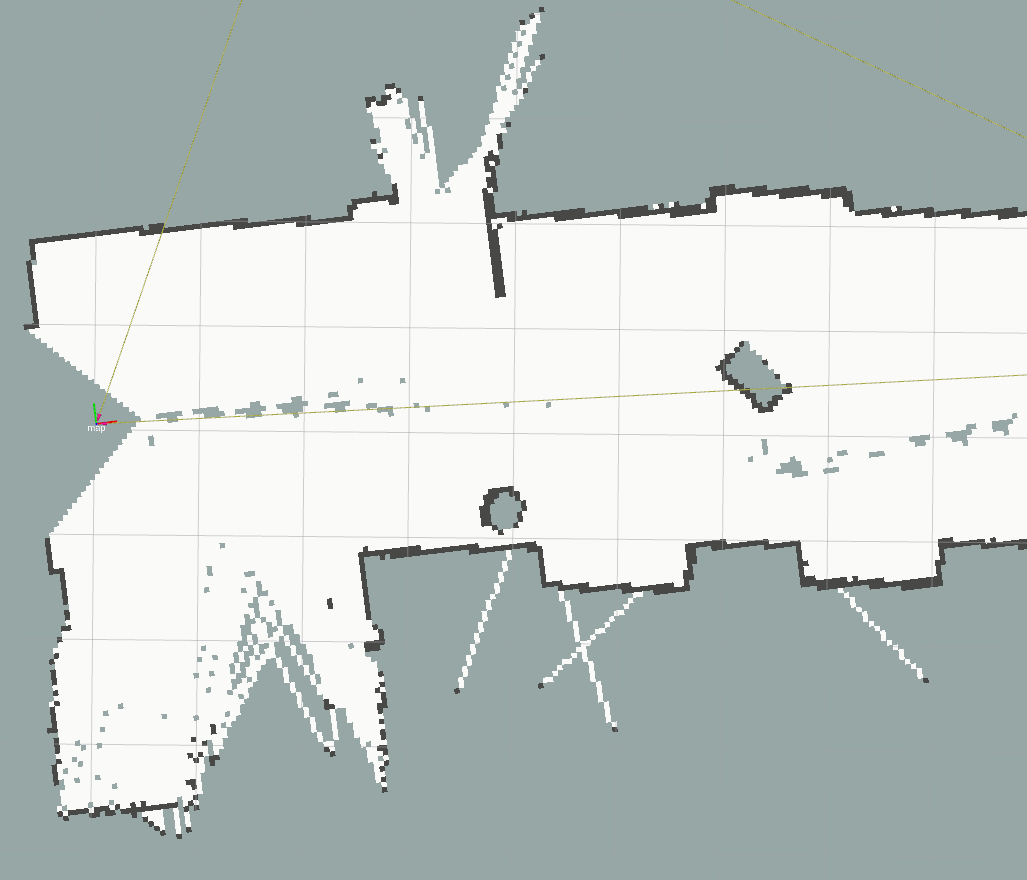
В случае, когда робот двигается только по ровной плоской поверхности, например при движении внутри помещений, то представление карты можно значительно упростить, рассматривая только план местности. При этом карта представляется в виде растрового 8-битного изображения, каждая точка которого кодирует наличие препятствия в соответствующей области на карте: 0 - свободно, 100 - занятно, -1 - неизвестно:
Карта всей местности называется “глобальной” картой. Для сохранения и загрузки глобальной карты в ROS существует пакет map_server, являющийся частью стека ROS navigation.
Глобальная карта используется для локализации - определения положения робота на ней. Также глобальная карта применяется для построения глобальной траектории при автономной навигации.
Требования к роботу
Минимальный набор датчиков, необходимый для построения карты:
- Колёсные энкодеры(одометры) для оценки пройдённого пути. Необходимы для подсказки алгоритму SLAM приращения координат.
- Датчик расстояния до препятствий. Чем выше разрешение датчика, тем более детальной может быть построена карта. Большинство доступных пакетов ROS для построения карты поддерживают лидары.
- IMU(или БИНС) опционально может использоваться в качестве дополнительного источника информации для уточнения данных одометрии и компенсации угла наклона робота при движении по неровной поверхности.
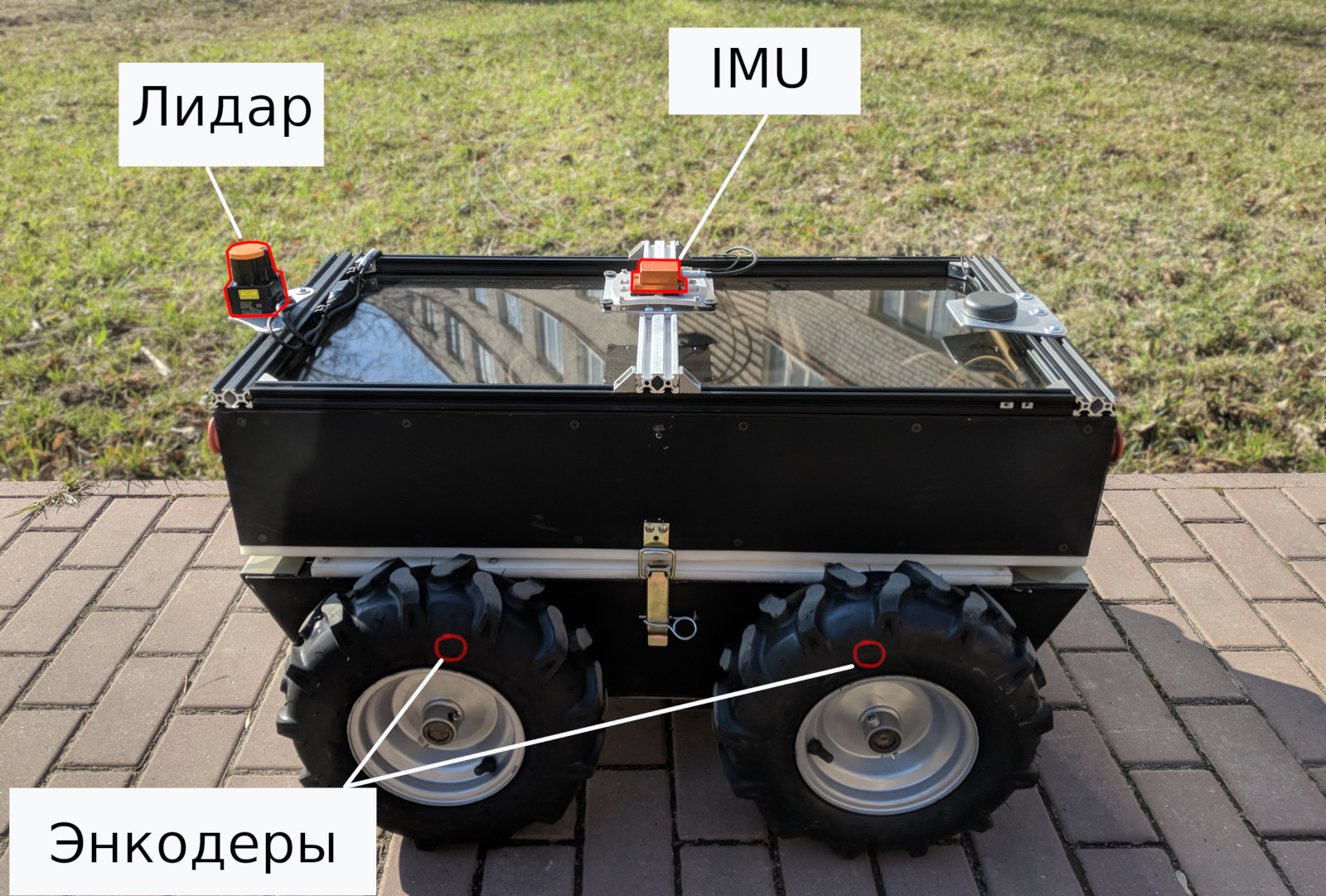
Комплект для 2D навигации робота Вомбат содержит все необходимые датчики для построения двухмерной карты.
Обзор доступных пакетов для построения карты в ROS
Для построения 2D карты в ROS существует несколько пакетов:
- gmapping - OpenSlam’s Gmapping
- hector_slam - Hector SLAM
- ohm_tsd_slam - ohm_tsd_slam
Данные пакеты используют лидары в качестве основного датчика положения препятствий. Робот Вомбат полностью совместим с каждым из пакетов для построения карты.
Построение карты помещения с помощью hector_slam
Рассмотрим процесс построения карты с помощью робота Вомбат.
Предполагается, что робот будет осуществлять движение на плоской поверхности в окружении стен и достаточного количества препятствий. Типичной средой для этого является помещение, лаборатория или коридор здания. Следует учитывать, что резкие изменения угла наклона робота относительно плоскости земли, вызванные наездом на высокие пороги или препятствия, могут ухудшить результат работы алгоритма построения карты.
После запуска процесса построения карты необходимо управлять роботом в режиме телеуправления(с помощью пульта ДУ), “проведя” его по исследуемой территории. В процессе движения алгоритм построения карты будет объединять показания датчиков и инкрементально “достраивать” карту. Когда карта требуемого пространства будет построена, её можно сохранить на диск для дальнейшего использования в задаче навигации по известной карте.
Процесс запуска нод построения карты с помощью hector_slam следующий:
Для бортового компьютера:
- В окне терминала выполнить команду:
roscore - В другом окне терминала выполнить команду:
roslaunch wombat_navigation hector_mapping.launch
Для компьютера оператора:
export ROS_MASTER_URI=http://192.168.1.10:11311
rviz
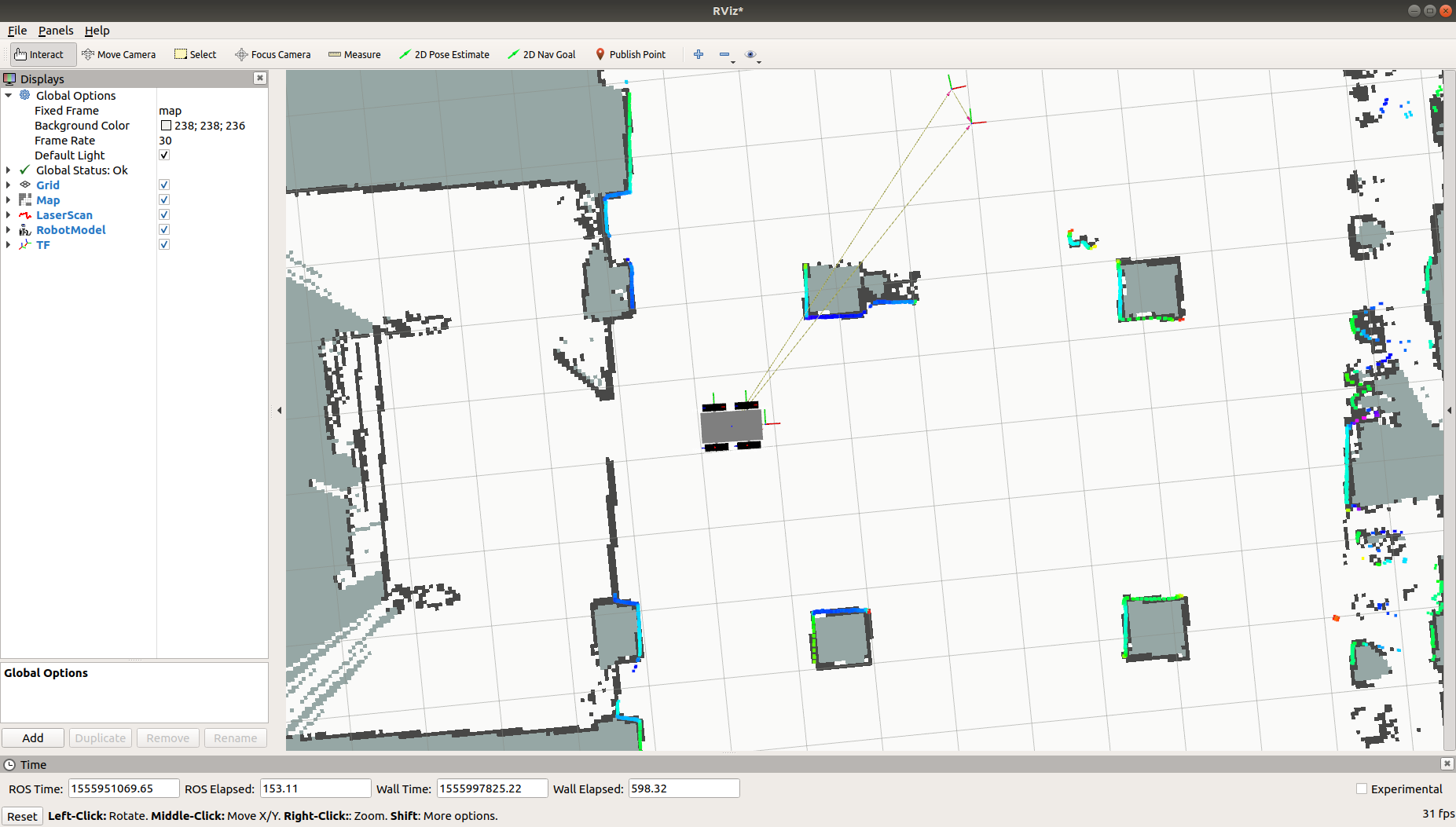
Окно утилиты rviz будет иметь следующий вид:
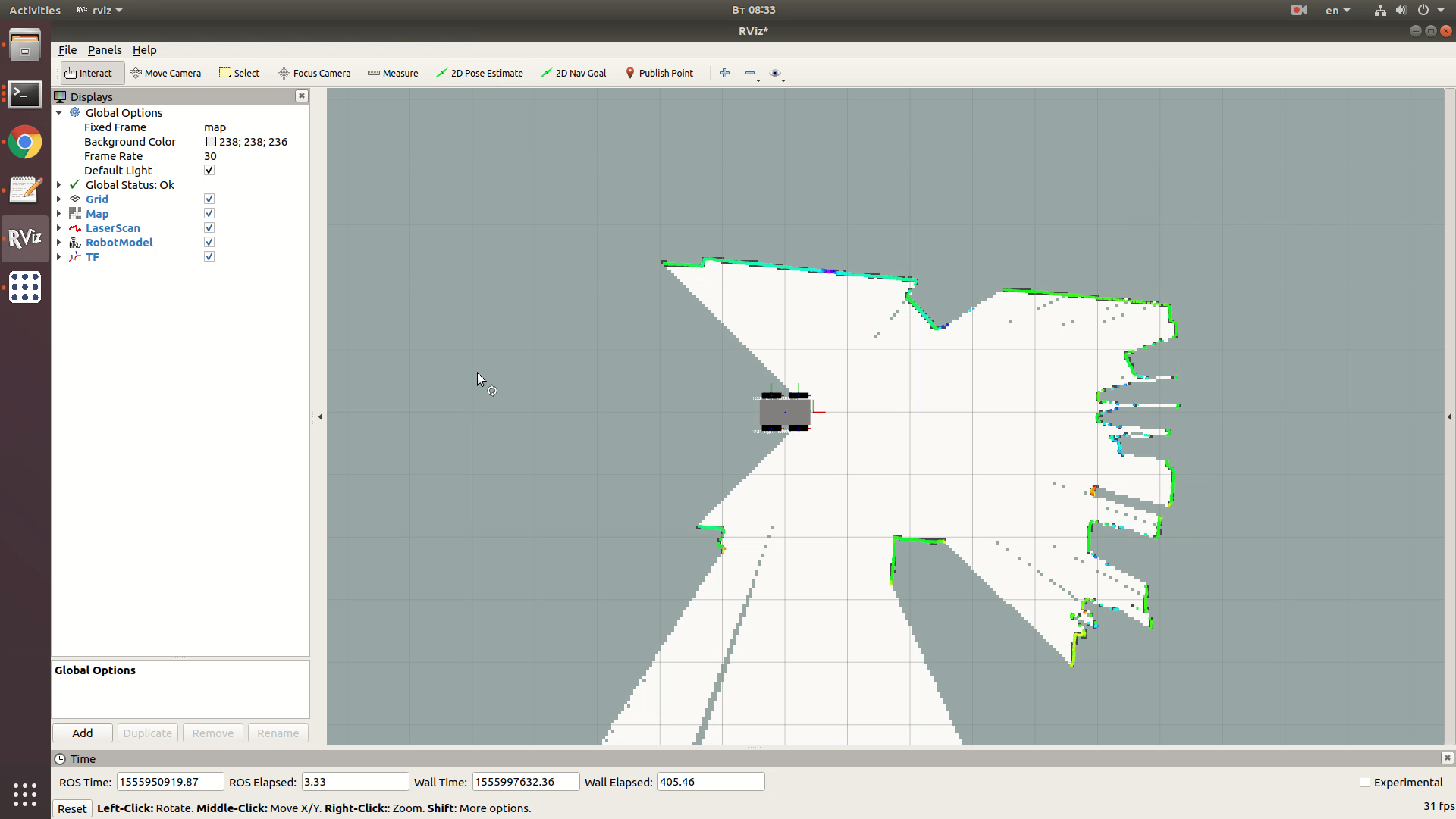
После этого, с помощью пульта ДУ осуществите перемещение робота по исследуемой местости, чтобы требуемые участки помещения попали на карту.
Видео процесса построения карты:
Сохранение карты
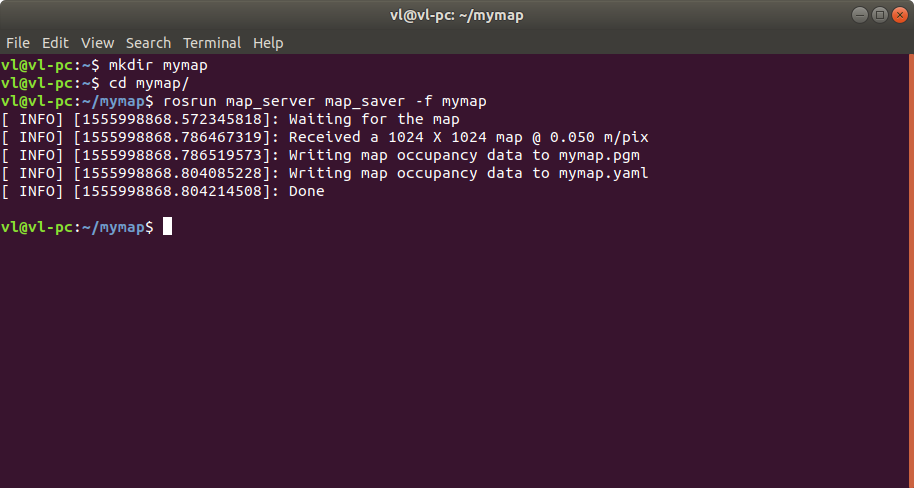
Когда карта построена, её можно сохранить для дальнейшего использования с помощью утилиты map_saver. Для этого в новом окне терминала(на бортовом компьютере) необходимо выполнить:
mkdir mymap
cd mymap/
rosrun map_server map_saver -f mymap
C помощью команды mkdir мы создаём новый каталог mymap, а команда cd осуществляет переход в него.
При успешном выполнении, карта будет сохранена в каталоге mymap в виде набора файлов mymap.pgm и mymap.yaml
Файл с расширением yaml содержит служебную информацию о карте.
image: mymap.pgm
resolution: 0.050000
origin: [-25.624998, -25.624998, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
Файл pgm представляет собой растровое изображение. При необходимости его можно отредактировать в графическом редакторе, например, чтобы убрать артефакты от движущихся объектов.